Tin tức
Cách tính mômen truyền động của động cơ cho hệ thống dây đai và ròng rọc

Th4
Các hệ thống tuyến tính dẫn động bằng dây đai thường phổ biến trong các ứng dụng yêu cầu di chuyển dài và tốc độ cao, chẳng hạn như rô bốt giàn và vận chuyển và xử lý vật liệu. Động cơ được lựa chọn cho các hệ thống này thường là động cơ servo, cho khả năng điều khiển chính xác vị trí, tốc độ và mô-men xoắn.
Định cỡ và chọn mô tơ servo yêu cầu xác định cả mômen truyền động liên tục và gián đoạn cần thiết cho ứng dụng. Mô-men xoắn liên tục được tính bằng cách lấy bình phương trung bình căn của tất cả các yêu cầu mô-men xoắn trong suốt ứng dụng – mô-men xoắn cần thiết để tăng tốc, mô-men xoắn cho vận tốc không đổi và mô-men xoắn để giảm tốc. Trong hầu hết các ứng dụng, mô-men xoắn cực đại (gián đoạn) xuất hiện trong quá trình tăng tốc.
Để xác định mô-men xoắn bình phương (liên tục), trước tiên chúng ta tính toán các giá trị mô-men xoắn cần thiết trong mỗi giai đoạn của biên dạng chuyển động.
Bộ truyền động bằng dây đai có thể cung cấp chiều dài dài và tốc độ cao.
Mô-men xoắn cần thiết cho vận tốc không đổi
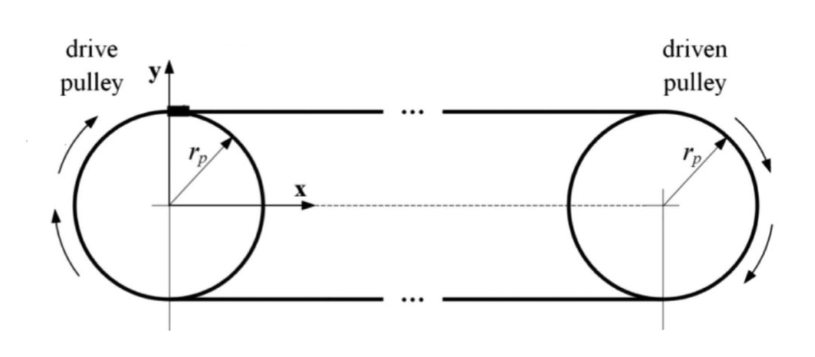
Đối với hệ thống truyền động bằng dây đai, mômen động cơ yêu cầu trong quá trình vận tốc không đổi chỉ đơn giản là tổng lực dọc trục (Fa) trên dây đai nhân với bán kính (r1) của puli truyền động.
Tc = mô-men xoắn cần thiết khi vận tốc không đổi (Nm)
Fa = tổng lực dọc trục (N)
r1 = bán kính của puli dẫn động (mm)
η = hiệu quả của hệ thống truyền động đai
Chú ý rằng hiệu suất (η) của hệ thống truyền động đai được bao gồm trong phương trình mômen xoắn. Hiệu suất này giải thích cho các tổn thất như ma sát giữa dây đai và ròng rọc. Cũng lưu ý rằng chúng tôi đã giả định rằng puli truyền động và puli không tải (được điều khiển) có cùng bán kính, điều này thường xảy ra đối với các hệ thống chuyển động thẳng dẫn động bằng dây đai.
Không giống như bộ truyền động trục vít, thường gặp lực dọc trục do các hoạt động bên ngoài như ép hoặc khoan, bộ truyền động đai không được thiết kế để chịu lực dọc trục bên ngoài. Vì vậy, tổng lực dọc trục của một hệ thống truyền động đai chỉ bao gồm lực cần thiết để di chuyển tải, đó là trọng lượng (m * g) của tải (cả tải ngoài và đai) nhân với hệ số ma sát (μ ) của thanh dẫn hỗ trợ tải.
m = khối lượng tải trọng di chuyển (tải trọng bên ngoài cộng với đai) (kg)
g = trọng lực (m / s2)
μ = hệ số ma sát của thanh dẫn
Mô-men xoắn cần thiết để tăng tốc
Giai đoạn tăng tốc của biên dạng chuyển động thường là giai đoạn mà mô-men xoắn cực đại được yêu cầu từ động cơ và giá trị mô-men xoắn này, Ta, thường được coi là mô-men xoắn gián đoạn.
Mô-men xoắn cần thiết trong quá trình tăng tốc bao gồm mô-men xoắn cần thiết ở tốc độ không đổi cộng với mô-men xoắn cần thiết để tăng tốc tải.
mô-men xoắn truyền động cơ
Ta = tổng mô-men xoắn cần thiết trong quá trình tăng tốc (Nm)
Tacc = mô-men xoắn cần thiết do gia tốc (Nm)
Mômen do gia tốc được tìm thấy bằng cách nhân tổng quán tính của hệ (Jt) với gia tốc góc (α). mô-men xoắn truyền động cơ
Jt = tổng quán tính của hệ (kgm2)
a = gia tốc góc (rad / s2)
Tổng quán tính của hệ thống bao gồm quán tính của động cơ (vì động cơ phải vượt qua quán tính của chính nó), khớp nối, puli và tải.
Jm = quán tính của động cơ (do nhà sản xuất cung cấp) (kgm2)
Jc = quán tính của khớp nối (do nhà sản xuất cung cấp) (kgm2)
Jp1 = quán tính của puli truyền động (do nhà sản xuất cung cấp hoặc tính toán) (kgm2)
Jp2 = quán tính của ròng rọc chạy không tải (do nhà sản xuất cung cấp hoặc tính toán) (kgm2)
Jl = quán tính của tải (kgm2)
Mặc dù ở trên chúng ta đã giả định rằng puli truyền động và puli chạy không tải có cùng bán kính, nhưng quán tính của chúng có thể hơi khác nhau, vì puli dẫn động có răng và do đó, có bán kính lớn hơn một chút và khối lượng cao hơn puli chạy không tải.
Các giá trị quán tính của động cơ, khớp nối và ròng rọc thường do các nhà sản xuất tương ứng quy định. Tuy nhiên, quán tính của tải phải được tính toán. Hãy nhớ rằng tải trọng bao gồm khối lượng của cả tải trọng bên ngoài và dây đai, vì động cơ phải tạo ra đủ mô-men xoắn để thắng quán tính của dây đai.
mô-men xoắn truyền động cơ
ml = khối lượng của tải bên ngoài (kg)
mb = khối lượng của đai (kg)
r1 = bán kính của puli dẫn động (mm)
Đối với gia tốc góc, ta giả sử rằng hệ đang tăng tốc từ 0 đến một vận tốc cực đại nào đó, với N là vận tốc góc lớn nhất và t là thời gian gia tốc.
N = vận tốc góc lớn nhất (vòng / phút)
t = thời gian để tăng tốc
Nếu hệ thống đang tăng tốc từ một vận tốc khác 0, thì phương trình sẽ đơn giản là kết hợp sự thay đổi của vận tốc (ΔN) chia cho thời gian mà sự gia tăng vận tốc xảy ra (Δt).
Mô-men xoắn cần thiết để giảm tốc
Mômen truyền động của động cơ cần để giảm tốc bằng mômen ở vận tốc không đổi trừ đi mômen do gia tốc.
mô-men xoắn truyền động cơ
Td = mô-men xoắn cần thiết trong quá trình giảm tốc (Nm)
Mô-men xoắn liên tục
Bây giờ chúng ta đã biết mômen truyền động của động cơ cần thiết trong quá trình tăng tốc, vận tốc không đổi và giảm tốc, chúng ta có thể lấy bình phương trung bình của các giá trị này để xác định mômen xoắn liên tục mà động cơ yêu cầu.
mô-men xoắn truyền động cơ
TRMS = mô-men xoắn bình phương trung bình (liên tục) (Nm)
ta = thời gian để tăng tốc
tc = thời gian cho (các) vận tốc không đổi
td = thời gian giảm tốc
ttotal = tổng thời gian di chuyển (bao gồm bất kỳ thời gian nhàn rỗi nào giữa các lần di chuyển) (các)
Cách tính mômen truyền động của động cơ cho hệ thống dây đai và ròng rọc
BÀI VIẾT LIÊN QUAN:
Cách lựa chọn mã sản phẩm , vật liệu , đặc tính và thông số kỹ thuật cũng như yêu cầu của quý khách hàng.Mọi thắc mắc cần được giải đáp cũng như tư vấn và nhận báo giá xin liên hệ với thông tin bên dưới :
CÔNG TY TNHH TÂN HẢI : 453B Đường Chiến Lược, Khu Phố 6, Phường Tân Tạo, Quận Bình Tân, Thành phố Hồ Chí Minh
Email : tanhai.automation@gmail.com Phone and zalo: Mr Trung : 0397536266