Tin tức
Bộ định vị van điều khiển

Th6
Lý do tại sao vị trí gốc của van điều khiển khí nén tương ứng tuyến tính với lượng áp suất không khí tác dụng lên bộ truyền động là vì lò xo cơ học có xu hướng tuân theo Định luật Hooke, trong đó lượng chuyển động của lò xo (x) tỷ lệ thuận với lực tác dụng (F = kx ).
Bộ truyền động khí nén tác dụng lực như một hàm của áp suất không khí và diện tích piston / màng ngăn (F = PA), và đến lượt nó, lò xo sẽ nén hoặc giãn để tạo ra một phản lực bằng nhau và ngược chiều. Kết quả cuối cùng là áp suất của bộ truyền động chuyển tuyến tính thành chuyển động của thân van (x = PA / k).
Mối quan hệ tuyến tính và có thể lặp lại này giữa áp suất tín hiệu khí nén và vị trí thân van đúng nếu và chỉ khi màng kích động / piston và lò xo là lực duy nhất tác động lên thân van. Nếu có bất kỳ lực nào khác tác động lên cơ chế này, mối quan hệ giữa áp suất tín hiệu và vị trí thân van sẽ không còn lý tưởng nữa.
Thật không may, tồn tại nhiều lực khác tác động lên thân van ngoài lực truyền động và phản lực của lò xo.
Ma sát từ bao gói thân là một lực như vậy và phản lực tại nút van gây ra bởi chênh lệch áp suất trên khu vực của phích cắm là một lực khác (Chú thích 1). Những lực này âm mưu để định vị lại thân van, do đó hành trình của thân van không tương quan chính xác với áp suất chất lỏng kích hoạt.
Lưu ý 1: Một cách để giảm thiểu lực động trên phích cắm van cầu là sử dụng thiết kế phích cắm hai cổng hoặc sử dụng phích cắm cân bằng trên van cầu dẫn hướng lồng. Tuy nhiên, một nhược điểm đối với cả hai thiết kế phích cắm van này là khó khăn hơn trong việc đóng ngắt chặt chẽ.
Một giải pháp phổ biến cho tình huống khó xử này là thêm một bộ định vị vào cụm van điều khiển.
Bộ định vị van điều khiển
Bộ định vị là một thiết bị điều khiển chuyển động được thiết kế để chủ động so sánh vị trí thân với tín hiệu điều khiển, điều chỉnh áp suất lên màng ngăn hoặc piston của bộ truyền động cho đến khi đạt được vị trí chính xác của thân:
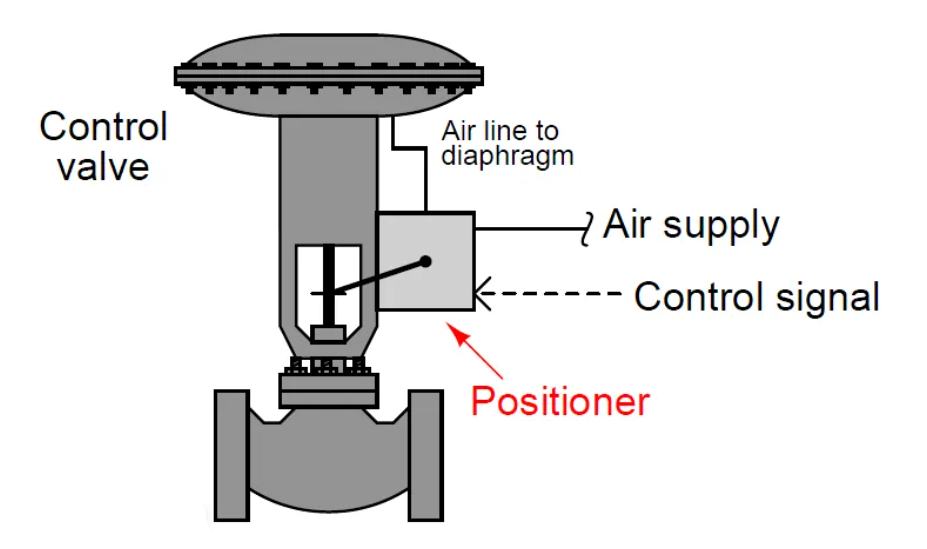
Bộ định vị về cơ bản hoạt động như hệ thống điều khiển bên trong chúng (Chú thích 2): vị trí gốc của van là biến quá trình (PV), tín hiệu lệnh tới bộ định vị là điểm đặt (SP) và tín hiệu của bộ định vị tới bộ truyền động van là biến được điều khiển (MV) hoặc đầu ra.
Do đó, khi bộ điều khiển quá trình gửi tín hiệu lệnh đến van được trang bị bộ định vị, bộ định vị sẽ nhận được tín hiệu lệnh đó và áp dụng nhiều hoặc ít áp suất không khí lên bộ truyền động nếu cần để đạt được vị trí gốc mong muốn đó.
Do đó, bộ định vị sẽ “chiến đấu” chống lại bất kỳ lực nào khác tác động lên thân van để đạt được định vị thân van chính xác và sắc nét theo tín hiệu lệnh. Bộ định vị hoạt động đúng cách đảm bảo van điều khiển sẽ “hoạt động tốt” và tuân theo tín hiệu lệnh.
Lưu ý 2: Thuật ngữ kỹ thuật cho loại hệ thống điều khiển này là tầng, trong đó đầu ra của một bộ điều khiển trở thành điểm đặt cho một bộ điều khiển khác.
Trong trường hợp bộ định vị van, bộ định vị nhận điểm đặt vị trí gốc van từ bộ điều khiển quá trình chính. Chúng ta có thể nói rằng bộ điều khiển quá trình chính trong trường hợp này là bộ điều khiển chính hoặc chính, trong khi bộ định vị van là bộ điều khiển phụ hoặc phụ.
Hình ảnh sau đây cho thấy một bộ định vị khí nén kiểu Fisher 3582 được gắn vào một van điều khiển. Bộ định vị là hộp màu xám với ba đồng hồ đo áp suất ở phía bên phải của nó:

Ở phía bên trái của bộ định vị này có thể được nhìn thấy một phần của cơ chế phản hồi: một giá đỡ kim loại được bắt vít vào đầu nối thân van, liên kết với một cánh tay ra khỏi mặt của bộ định vị.
Mọi bộ định vị van điều khiển phải được trang bị một số phương tiện để cảm nhận vị trí của thân van, nếu không bộ định vị không thể so sánh vị trí của thân van với tín hiệu lệnh.
Một bộ định vị hiện đại hơn xuất hiện trong bức ảnh tiếp theo, Fisher DVC6000 (một lần nữa, hộp màu xám với đồng hồ đo áp suất ở phía bên phải của nó):
Giống như thiết bị định vị kiểu 3582 cũ hơn, kiểu DVC6000 này sử dụng liên kết phản hồi ở phía bên trái để cảm nhận vị trí của thân van. Model DVC6200 thậm chí còn mới hơn sử dụng cảm biến Hiệu ứng Hall từ tính để cảm nhận vị trí của nam châm được bắt vít vào thân van.
Thiết kế phản hồi vị trí phi cơ học này giúp loại bỏ phản ứng dữ dội, mài mòn, nhiễu và các vấn đề tiềm ẩn khác liên quan đến các liên kết cơ học. Phản hồi tốt hơn là điều cần thiết để định vị van tốt hơn.
Bộ định vị van điều khiển thường được cấu tạo theo cách để tạo nguồn và thoát ra tốc độ dòng khí cao, sao cho bộ định vị cũng đáp ứng chức năng của bộ tăng âm lượng (Chú thích 3).
Do đó, một bộ định vị không chỉ đảm bảo định vị thân van chính xác hơn mà còn vận tốc thân van nhanh hơn (và thời gian trễ ngắn hơn) so với nếu bộ truyền động van được “cấp nguồn” trực tiếp bởi bộ chuyển đổi I / P.
Lưu ý 3: Điều này không có nghĩa là bộ định vị van không cần bộ tăng thể tích bên ngoài, chỉ là công suất dòng khí kích hoạt của bộ định vị điển hình vượt quá khả năng dòng khí của bộ chuyển đổi I / P điển hình.
Một ưu điểm khác của việc thêm bộ định vị vào van điều khiển được dẫn động bằng khí nén là chỗ ngồi của van cao hơn (ngắt chặt). Lợi ích này không rõ ràng ở lần kiểm tra đầu tiên, và do đó, một số giải thích là theo thứ tự.
Đầu tiên, người ta phải hiểu rằng chỉ tiếp xúc giữa phích cắm và chỗ ngồi trong van trượt không đủ để đảm bảo đóng ngắt chặt chẽ. Thay vào đó, phích cắm phải được ấn mạnh xuống ghế để ngắt hoàn toàn tất cả dòng chảy qua van.
Bất cứ ai đã từng siết chặt tay cầm của một cái yếm ống bị rò rỉ (vòi vườn) đều hiểu trực quan nguyên tắc này: một lực tiếp xúc nhất định giữa phích cắm và yên xe là cần thiết để làm biến dạng nhẹ và do đó đúc hai thành phần đó thành một chất lỏng hoàn hảo. -giữ vừa vặn. Thuật ngữ kỹ thuật cho yêu cầu cơ học này là tải trọng của ghế.
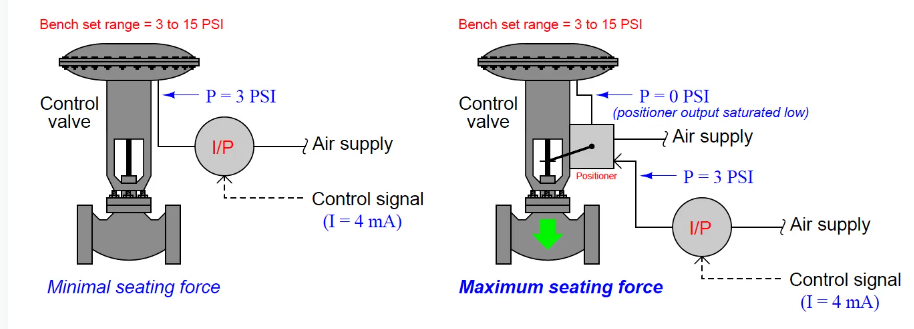
Hãy tưởng tượng nếu bạn sẽ sử dụng một van điều khiển đóng mở bằng màng ngăn, thân trượt, không khí để mở với phạm vi đặt trên băng ghế dự bị từ 3 đến 15 PSI.
Ở áp suất đặt của bộ truyền động là 3 PSI, màng chắn tạo ra lực vừa đủ để vượt qua chính xác lực tải trước của lò xo bộ truyền động, nhưng không đủ lực để thực sự di chuyển phích cắm ra khỏi ghế.
Nói cách khác, ở áp suất màng ngăn 3 PSI, phích cắm đang chạm vào yên xe nhưng ít hoặc không có lực để tạo ra một nút đóng ngắt chặt chẽ.
Nếu van điều khiển này được cấp nguồn trực tiếp bởi bộ chuyển đổi I / P với phạm vi hiệu chỉnh 3-15 PSI, điều đó có nghĩa là van sẽ gần như không đóng ở giá trị tín hiệu 0% (3 PSI) chứ không phải tắt chặt.
Để hoàn toàn ép nút van vào chân van để đạt được độ kín khít, tất cả áp suất không khí sẽ phải được thoát ra khỏi màng ngăn để đảm bảo không có lực màng ngăn nào chống lại lò xo. Điều này là không thể với I / P có phạm vi hiệu chỉnh từ 3-15 PSI.
Bây giờ, hãy tưởng tượng rằng cùng một van chính xác được trang bị bộ định vị, lấy tín hiệu 3-15 PSI từ I / P và sử dụng nó như một lệnh (điểm đặt) cho vị trí thân van, áp dụng áp suất nhiều hay ít lên màng ngăn khi cần thiết. đạt được vị trí gốc mong muốn.
Hiệu chỉnh bộ định vị thích hợp sao cho thân van không bắt đầu nâng lên cho đến khi tín hiệu tăng nhẹ trên 0%, có nghĩa là ở 0% (4 mA) bộ định vị sẽ cố gắng ép van về vị trí gốc âm một chút.
Khi cố gắng đạt được nhu cầu bất khả thi này, đầu ra của bộ định vị sẽ bão hòa ở mức thấp, không tạo áp lực nào lên màng kích hoạt, dẫn đến toàn bộ lực lò xo do phích cắm tác dụng lên ghế.
So sánh hai kịch bản được hiển thị ở đây:
Trong khi bộ định vị có lợi trên bộ truyền động van được trang bị lò xo, chúng hoàn toàn cần thiết cho một số kiểu bộ truyền động khác.
Hãy xem xét thiết bị truyền động piston khí nén tác động kép sau đây không có lò xo:
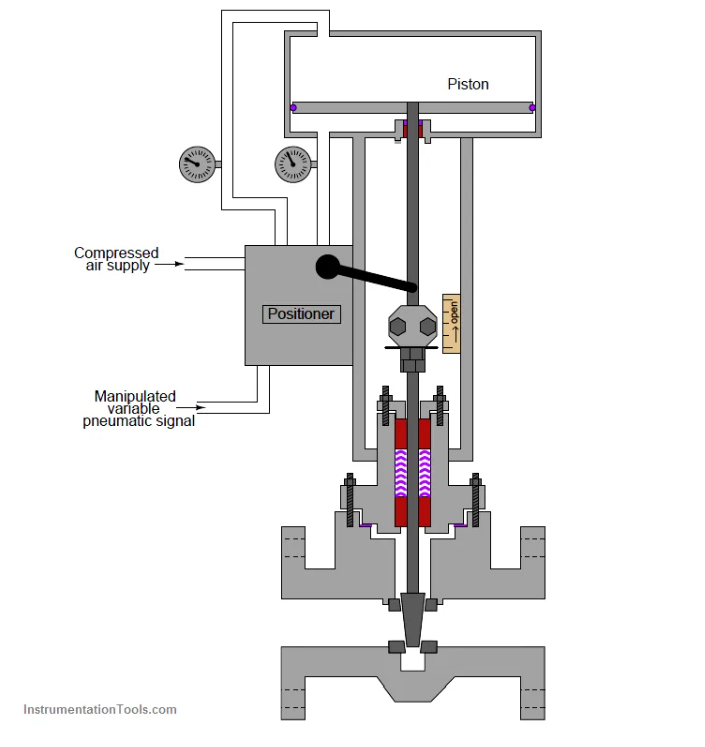
Nếu không có lò xo cung cấp lực hạn chế để đưa van về vị trí “an toàn khi không hoạt động”, thì sẽ không tồn tại mối quan hệ của Định luật Hooke giữa áp suất không khí được đặt vào và vị trí thân van. Bộ định vị phải luân phiên tác động áp suất không khí lên cả hai bề mặt của piston để nâng và hạ thân van.
Bộ truyền động van điều khiển điện là một loại thiết kế bộ truyền động khác hoàn toàn yêu cầu một số dạng hệ thống định vị, bởi vì động cơ điện không “nhận biết” về vị trí trục của chính nó để nó có thể di chuyển chính xác một van điều khiển.
Do đó, mạch định vị sử dụng chiết áp hoặc cảm biến LVDT / RVDT để phát hiện vị trí gốc van và một bộ đầu ra bóng bán dẫn để điều khiển động cơ là cần thiết để làm cho bộ truyền động điện đáp ứng với tín hiệu điều khiển tương tự
Cách lựa chọn mã sản phẩm , vật liệu , đặc tính và thông số kỹ thuật cũng như yêu cầu của quý khách hàng.Mọi thắc mắc cần được giải đáp cũng như tư vấn và nhận báo giá xin liên hệ với thông tin bên dưới :
CÔNG TY TNHH TÂN HẢI : 453B Đường Chiến Lược, Khu Phố 6, Phường Tân Tạo, Quận Bình Tân, Thành phố Hồ Chí Minh
Email : tanhai.automation@gmail.com Phone and zalo: Mr Trung : 0397536266