
Tin tức
Chọn và đặt ứng dụng bằng cách sử dụng miếng hút chân không khí nén:
Th3
Mô tả ứng dụng:
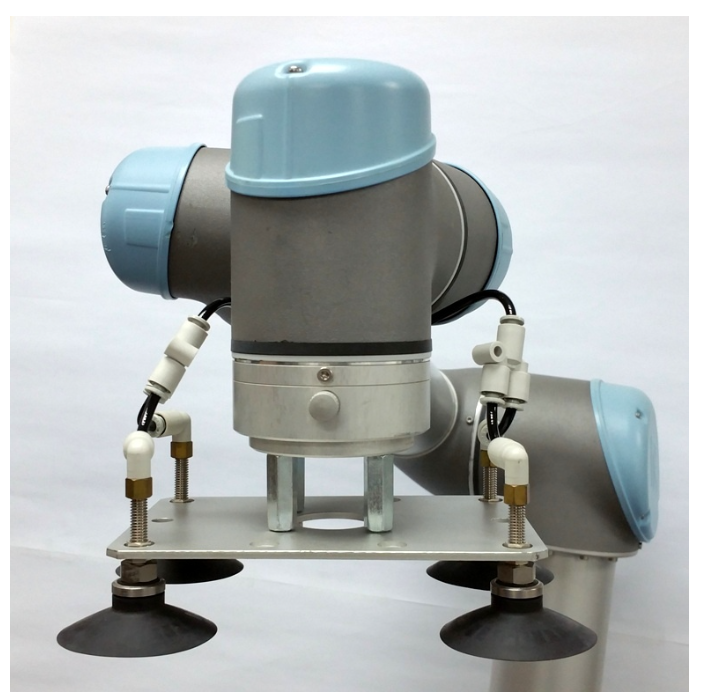
Ứng dụng này cho thấy một giải pháp cho Chọn và Đặt bằng cách sử dụng miếng hút chân không trên Universal-Robots (Xem thêm các bài viết khác để biết ví dụ về cách sử dụng bộ kẹp). Tấm hút chân không là sự lựa chọn điển hình làm hiệu ứng cuối vì chúng thường có chi phí thấp hơn – thực hiện nhanh chóng, nhưng quan trọng là do bản chất của đối tượng cần xử lý. Ví dụ: nếu đối tượng là một khu vực phẳng lớn hơn đáng kể, nơi khó có thể cầm nắm tốt bằng kẹp “kiểu ngón tay” – thì tốt hơn là sử dụng các miếng hút chân không để giữ đồ vật.
Tuy nhiên, nó đòi hỏi phải có một nguồn cung cấp không khí có sẵn dưới dạng khí nén (phổ biến nhất) hoặc một máy bơm chân không. Khí nén cho đến nay là phổ biến nhất vì dù sao nó cũng rất thường có sẵn trong xưởng hoặc cơ sở sản xuất cho nhiều cơ sở lắp đặt khí nén khác tại địa điểm này.
Một lý do giải thích cho việc nguồn khí nén khả thi hơn nguồn chân không – là vì việc chia sẻ khí nén dễ dàng hơn nhiều miễn là áp suất đủ cao – hơn là chia sẻ chân không – nếu chỉ một lỗ mở trong môi trường có nhiều chân không hơn ” người tiêu dùng ”sau đó toàn bộ chân không hoạt động và không sử dụng. Nhưng thay vào đó, trong khí nén, áp suất thường đủ cao để nếu có nhiều “người tiêu thụ” khí nén thì nó sẽ không ảnh hưởng đến nhau nhiều đến mức trong một hệ thống tốt, mỗi hệ thống sẽ vẫn hoạt động.
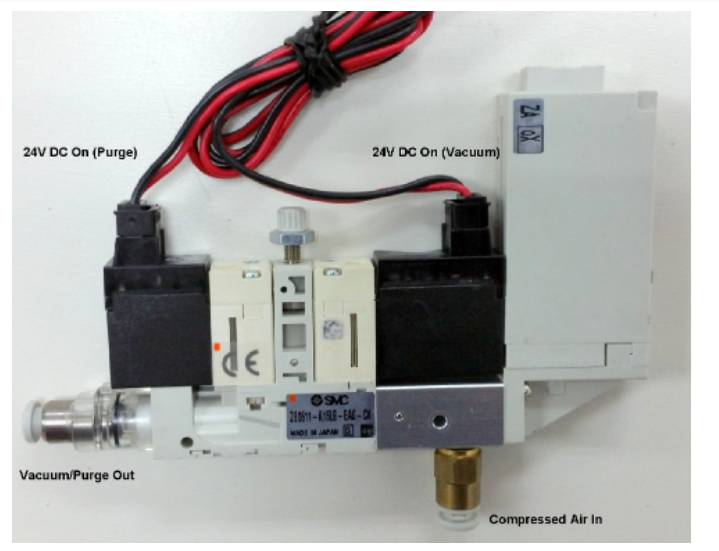
Do đó để tạo ra chân không (hút = không khí âm) từ không khí nén (dương) – cần thiết phải có máy phóng chân không. Máy phun chân không có thể tạo chân không từ khí nén và ví dụ này sẽ sử dụng máy phun chân không.
Một lợi thế lớn khác của việc sử dụng khí nén thay vì bơm chân không là nó cũng có thể “tẩy” – vì khi giữ một vật bằng cốc chân không (miếng đệm) thì một số áp suất chân không được tích tụ bên trong cốc chân không và hệ thống ống – vì vậy khi chân không quay thì áp suất này vẫn có thể giữ vật thể trong một thời gian trước khi vật thể thực sự được giải phóng – điều không mong muốn trong một hệ thống đáng tin cậy nhanh chóng và kịp thời. Do đó, khi một vật được giữ cần được thả ra – thì chân không ngay lập tức đảo ngược và thay vào đó, một áp suất không khí nhỏ được đẩy ra khỏi các cốc chân không – khiến vật đó được giải phóng rất nhanh.
Mô tả chức năng:
Bản thân ứng dụng này khá đơn giản để chọn và di chuyển một đối tượng từ nơi này sang nơi khác, ví dụ: trong một kịch bản đóng gói.
Đối với ứng dụng này, chỉ cần một điểm chân không và cho mục đích này, máy phóng chân không duy nhất được hiển thị trên hình bên dưới.
Nếu cần nhiều điểm chân không hơn là cài đặt có thể sử dụng nhiều vòi phun chân không hơn trên một ống góp – cũng được hiển thị trên ảnh dưới đây.
Bảng I / O Đầu ra:
DI0 = True = BẬT chân không, Sai = Tắt chân không.
DI1 = True = BẬT thanh lọc, Sai = Tắt thanh lọc.
Bảng biến thiên:
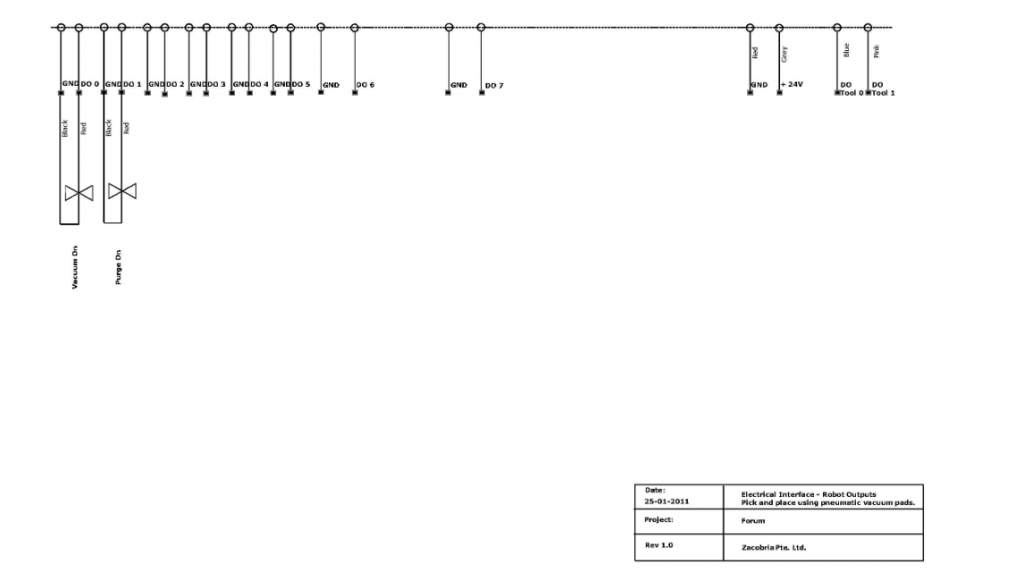
Các sơ đồ điện.
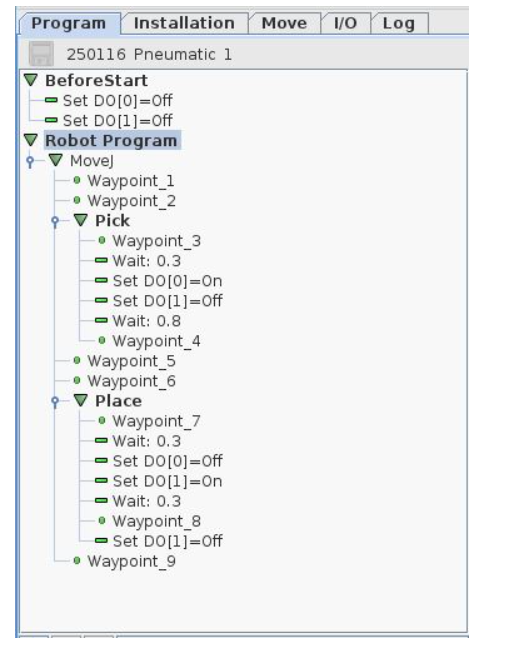
Mô tả chương trình:
Trong quy trình BeforeStart, hai đầu ra sử dụng DO0 và DO1 được đặt ở mức thấp để khởi tạo đầu ra thành một giá trị đã biết trước khi bắt đầu.
Nhặt:
Hai điểm tham chiếu đầu tiên 1 và 2 nằm trên vị trí chọn và đặt làm vị trí bắt đầu an toàn trong ví dụ này.
Sau đó, robot di chuyển xuống điểm tham chiếu 3, đó là khi các miếng hút chân không tiếp xúc với vật thể. Sau đó, chỉ cần đợi một khoảng thời gian nhỏ là 0,3 giây để đảm bảo rô bốt đã tiếp cận tốt đối tượng. Sau đó, chân không được bật bằng cách đặt DO0 thành ON. DO1 được đặt thành Tắt chỉ để đảm bảo quá trình thanh lọc được tắt. Sau đó, có một khoảng thời gian chờ nhỏ lại là 0,8 giây và thời gian chờ này có thể khác nhau giữa các ứng dụng. Mục đích của hướng dẫn chờ chỉ là để đảm bảo áp suất chân không có thể tích tụ đủ. Tôi hút chân không nhanh nhưng nếu không có thời gian để tăng áp suất chân không, sẽ có nguy cơ không có chốt chắc chắn và vật phẩm có thể rơi ra khi rô bốt di chuyển lên trên.
Điểm tham chiếu 5 và 6 di chuyển rô bốt lên và qua khu vực địa điểm.
Địa điểm:
Trong thư mục Place, rô bốt di chuyển xuống vị trí đặt và bây giờ đảo ngược DO0 và DO1 tức là DO0 bị Tắt và DO1 được Bật để giải phóng vật thể và cũng để tạo ra một thanh lọc nhỏ để vật phẩm bị đẩy ra khỏi miếng hút chân không .
Sau một thời gian chờ đợi nhỏ để đảm bảo vật thể đã được thả ra an toàn, robot sẽ di chuyển lên và quá trình thanh lọc được tắt bằng cách đặt DO1 Off.
Robot di chuyển lên trên và chương trình tự lặp lại.

BÀI VIẾT LIÊN QUAN: