
Tin tức
Ứng dụng của robot đơn trục vít me
Th10
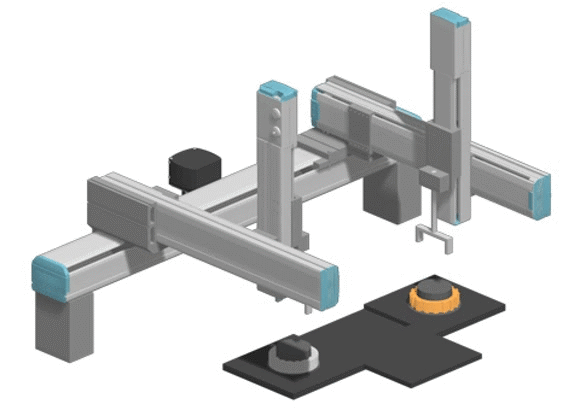
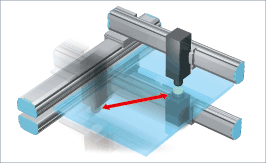
Robot Descartes (Ví dụ ứng dụng)
Ví dụ về việc sử dụng với trục đơn và trục bổ sung
1/Điều khiển rô bốt Descartes và rô bốt trục đơn bằng một bộ điều khiển duy nhất
Nhiều robot có thể được điều khiển đồng thời bằng một bộ điều khiển.
Hệ thống có thể được mở rộng lên đến hai nhóm với tám trục.
Nhiều robot được điều khiển bằng một bộ điều khiển, do đó có thể thiết lập sự hợp tác mà không cần PLC hoặc IO giữa các bộ điều khiển.
2/ Ví dụ về việc sử dụng ổ đĩa kép hành trình dài
Điều khiển truyền động kép cho phép các trục hành trình dài được sử dụng với sự kết hợp Descartes

Một nét vẽ dài lên đến khoảng. Trục Y 2m có thể sử dụng điều khiển ổ kép (đồng bộ 2 trục).
Hệ thống này hỗ trợ chuyển đường dài và thông số kỹ thuật tải nặng.
Sự kết hợp cơ chế tối ưu và phương pháp điều khiển được đề xuất theo độ lặp lại yêu cầu.
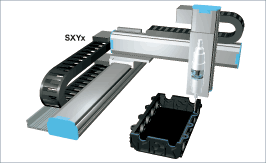
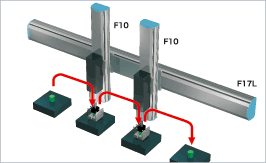
3/Chọn phần và đặt
Chọn & đặt thành phần từ chỉ mục
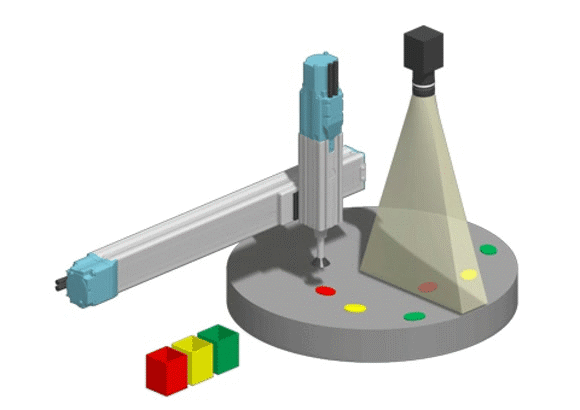
Các bộ phận được xác định trên chỉ số bởi thiết bị thị giác sẽ được robot loại bỏ và sắp xếp.
Thiết bị tầm nhìn xác định loại và vị trí và đưa ra vị trí di chuyển cho robot.
Ngoài các vị trí được dạy trước, robot có thể di chuyển đến vị trí được nhập ngẫu nhiên từ thiết bị bên ngoài.
Có thể chọn RS-232C, Ethernet hoặc các bus trường như CC-Link để giao tiếp với bộ điều khiển.
4/Chuyển quá trình sang quá trình sử dụng ổ đĩa kép
Sử dụng ổ đĩa kép để truyền tải các phôi lớn và nặng.
Dẫn động kép là chức năng đồng bộ và di chuyển hai rô bốt trục đơn cùng loại.
Ngay cả những vật nặng, hoặc các bộ phận và sản phẩm có kích thước khác nhau cũng có thể được chuyển bằng chức năng ổ đĩa kép này.
Chức năng này cải thiện khả năng tăng tốc và hiệu quả để giảm thời gian chu kỳ.
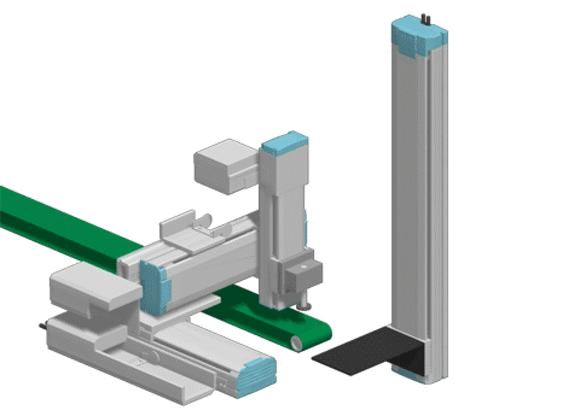
5/Hệ thống lắp ráp bộ phận
Lắp ráp ly hợp xe
Hai loại bộ phận được lắp ráp xen kẽ với hiệu quả cao
Cánh tay kép tiết kiệm không gian và giảm thời gian chu kỳ.
Thông số kỹ thuật tay đòn kép có thể được chọn làm tiêu chuẩn.
Có thể chọn riêng trái hoặc phải cho nét vẽ trục Y và trục Z (thứ tự đặc biệt).
Trục X kiểu quay đai ốc cũng hỗ trợ các hành trình dài và duy trì tốc độ tối đa.
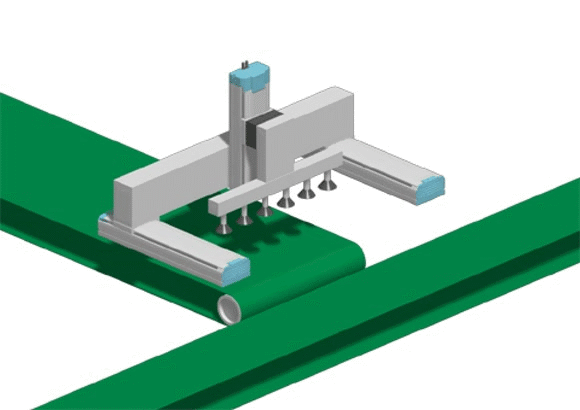
6/Băng tải (2 bộ phận đồng thời)
Vận chuyển với hiệu quả cao bằng cách sử dụng tay đòn kép.
Việc đặt 2 thiết bị trên trục Z giao nhau với XZ giúp cắt giảm đáng kể tổng thời gian xử lý và giảm không gian cài đặt cần thiết.
Chỉ có thể tùy chỉnh vì sử dụng khung và hướng dẫn có độ cứng cao.
7/Ứng dụng của chất kết dính
Ứng dụng chất kết dính trong một đơn vị xử lý bề mặt tinh thể lỏng kích thước lớn.
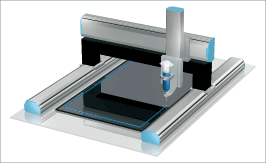
Có khả năng xử lý các phôi có kích thước lớn.
Cũng có thể áp dụng cho công việc cắt bằng máy cắt, kiểm tra bề mặt bằng máy ảnh, v.v.
8/IC palletizing trong đơn vị
Các IC được đưa ra khỏi pallet và các bộ phận được chuyển đến vị trí được chỉ định bởi rô bốt Descartes XYZ.
Ứng dụng như một bộ phận của máy được sử dụng trong quá trình mà một khuôn được gắn vào bảng mạch bằng cách sử dụng liên kết nén nhiệt trong sản xuất bán dẫn.
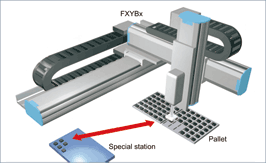
Bằng cách sử dụng bộ điều khiển RCX, có thể sử dụng kết quả của hoạt động dựa trên các biến trong quá trình xếp dỡ hàng hóa.
9/Tester (2 robot Descartes được điều khiển đồng thời)
Sử dụng như một người thử nghiệm trong quá trình sản xuất các bộ phận điện tử.
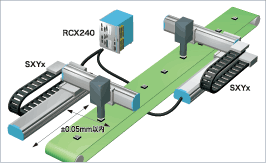
2 đơn vị SXYx được vận hành bằng cách sử dụng 1 đơn vị RCX340 với cài đặt cho 2 rô bốt.
Độ chính xác di chuyển thẳng đứng của trục XY của cả 2 đơn vị SXYx nằm trong khoảng + / 0,05mm
10/Niêm phong
Rải chất trám kín lên mặt giao phối của vỏ máy.
Ứng dụng ba chiều sử dụng robot 3 trục Descartes.
Robot Descartes kết hợp với máy mục đích đặc biệt.
11/Chuyển và xếp chồng thiết bị trong đơn vị
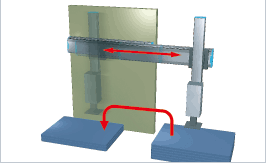
Trục X1 và X2 được đặt chồng lên nhau để đạt hiệu quả về không gian. Bố cục đơn vị dễ dàng ngay cả đối với nét gấp đôi.
12/Máy rút
Rải chất kết dính vào thùng phuy.
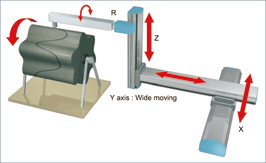
Tăng cường độ mạnh trục R cho phép hoạt động nội suy 3 chiều + R. Mỗi trục có độ cứng cao và do đó có thể dễ dàng chịu được các điều kiện khắc nghiệt như trên cánh tay di chuyển (tay cầm 100mm / giây)
13/Bộ chèn (Hủy bỏ trọng lượng trần bằng cách sử dụng bộ cân bằng không khí Z + di chuyển).
Phôi nặng được chèn trong pallet, v.v.
Phôi nặng trước khi xử lý đặt trong máy gia công.
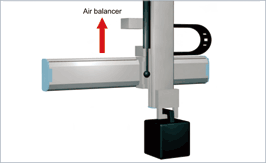
Loại di chuyển trục Z: Phôi nặng được bộ cân bằng không khí hủy bỏ và di chuyển lên xuống.
14/Máy cơ sở lắp ráp & kiểm tra (Hoạt động đồng thời ở cấp trên và cấp dưới)
Tester (đầu dò trên và dưới, camera có đèn chiếu sáng).
Máy hàn điểm chính xác. Lắp ráp đồng thời ở cấp trên và cấp dưới (các bộ phận trám, vặn vít).
Điều khiển đồng thời 2 robot Descartes.
Đảm bảo mức độ của rô bốt trên và dưới được đảm bảo (đặc điểm kỹ thuật tùy chỉnh).
Ứng dụng của robot đơn trục vít me
BÀI VIẾT LIÊN QUAN:
Cách lựa chọn mã sản phẩm , vật liệu , đặc tính và thông số kỹ thuật cũng như yêu cầu của quý khách hàng.Mọi thắc mắc cần được giải đáp cũng như tư vấn và nhận báo giá xin liên hệ với thông tin bên dưới :
CÔNG TY TNHH TÂN HẢI : 453B Đường Chiến Lược, Khu Phố 6, Phường Tân Tạo, Quận Bình Tân, Thành phố Hồ Chí Minh
Email : tanhai.automation@gmail.com Phone and zalo: Dương 0373261432