
Tin tức
Chọn và đặt ứng dụng bằng bộ kẹp điện Robotiq:

Th3
Chọn và đặt bằng kẹp điện Robotiq
Mô tả ứng dụng:
Bài viết này là một ví dụ về điều khiển bộ kẹp Robotiq trên Universal-Robots.
Ví dụ này sử dụng các tệp kịch bản Robotiq được cài đặt sẵn giúp kiểm soát vị trí bộ kẹp và lực đóng và mở bộ kẹp dễ dàng hơn nhiều.
Mô tả chức năng:
Bộ kẹp điện được kết nối với cổng USB trên Universal-Robots và đang sử dụng Widget do Robotiq cung cấp với các quy trình được xác định trước.
Tín hiệu dữ liệu USB được chuyển đổi sang RS-485 bằng bộ chuyển đổi USD-RS-485 bên ngoài.
Khi các tệp Robotiq được cài đặt, tiện ích Robotiq hiển thị dưới dạng “Gripper” và khi được nhấn, menu điều khiển Gripper sẽ xuất hiện.
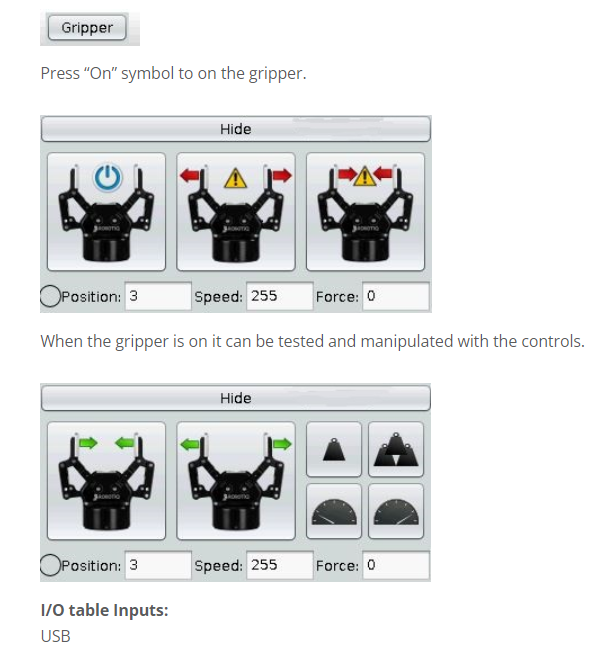
Đầu vào bảng I / O:
USB
Bảng I / O Đầu ra:
USB
Khi sử dụng Robotiq UR kit thì đã chuẩn bị sẵn các chương trình con để đóng mở và thiết lập các thông số.
Bảng biến thiên:
rq_move (0) (Bộ kẹp mở hoàn toàn).
rq_move (255) (Đóng hoàn toàn bộ kẹp).
rq_force≔255 (Đặt lực ở mức Tối đa).
rq_speed≔255 (Đặt tốc độ ở mức tối đa).
Mô tả chương trình:
Trong quy trình “BeforeStart”, quy trình Robotiq được xác định trước sẽ được tải.
Các biến được bắt đầu để đặt các giá trị, là lực kẹp và tốc độ kẹp được đặt thành 255, là cài đặt tối đa.
Trong chương trình Robot, robot được di chuyển vào vị trí bắt đầu và quy trình thiết lập tốc độ bộ kẹp được gọi là sau lệnh mở hoàn toàn bộ kẹp (vị trí 0).
Robot di chuyển xuống điểm tham chiếu 2, đây là vị trí có khả năng nhặt được vật thể. Khi rô bốt đã đến điểm tham chiếu 2, lệnh đóng bộ kẹp với vị trí 255 được đóng hoàn toàn, nhưng nếu có đối tượng, bộ kẹp sẽ dừng khi phát hiện có đối tượng.
Nếu bộ kẹp phát hiện một đối tượng, rô bốt sẽ di chuyển đến điểm tham chiếu 3. Nếu bộ kẹp không phát hiện một đối tượng thì bộ kẹp sẽ di chuyển trở lại điểm tham chiếu 1 và mở bộ kẹp và một lần nữa cố gắng đi đến điểm tham chiếu 2.
Nếu có một vật thể trong bộ kẹp, rô bốt sẽ di chuyển đến điểm 3 nằm trên vị trí chọn và sau đó rô bốt di chuyển đến điểm 4 ở trên vị trí đặt và di chuyển xuống điểm 5 là vị trí đặt. Tại vị trí đặt lệnh mở bộ kẹp được gọi và bộ kẹp mở ra. Lưu ý các lệnh chờ phục vụ chức năng cho phép bộ kẹp mở hoàn toàn và cũng đóng lại để có thể nhả tốt và bám chặt đối tượng.
Khi vật thể được thả ra, robot sẽ di chuyển trở lại đường dẫn để lấy một vật phẩm mới và chu trình tiếp tục.
BÀI VIẾT LIÊN QUAN:
Cách lựa chọn mã sản phẩm , vật liệu , đặc tính và thông số kỹ thuật cũng như yêu cầu của quý khách hàng.Mọi thắc mắc cần được giải đáp cũng như tư vấn và nhận báo giá xin liên hệ với thông tin bên dưới :
CÔNG TY TNHH TÂN HẢI : 453B Đường Chiến Lược, Khu Phố 6, Phường Tân Tạo, Quận Bình Tân, Thành phố Hồ Chí Minh
Email : tanhaiautomation@gmail.com Phone and zalo: Mr Trung : 0397536266