
Tin tức
Công bố người chiến thắng thiết kế robot mềm
Th8
Cuộc thi thiết kế và nghiên cứu robot mềm hàng năm lần thứ ba đã đánh giá các dự án thể hiện các phương pháp tiếp cận mới và sáng tạo đối với các thành phần và nghiên cứu của robot mềm. Người chiến thắng của cuộc thi vừa được công bố.
Cuộc thi được tài trợ bởi Soft Robotics Toolkit, một nhóm lớn lên từ quá trình nghiên cứu tại Đại học Harvard và Đại học Trinity College Dublin và tập trung vào việc phát triển các khóa học thiết kế thực hành bao gồm thiết kế, chế tạo và điều khiển thiết bị truyền động mềm. Nó đã phát triển thành một nguồn hỗ trợ phát triển công nghệ tiên tiến và nghiên cứu robot tiên tiến cho các kỹ sư, học giả và sinh viên.
Theo các nhà tài trợ, các bài dự thi năm nay đặc biệt cạnh tranh, với những người tham gia từ hơn 90 đội tranh giành giải thưởng ở một trong ba hạng mục: nghiên cứu robot mềm và thiết kế cấp đại học và trung học.
Người chiến thắng trong nghiên cứu
Hạng mục đầu tiên yêu cầu đóng góp đáng kể vào nghiên cứu trong lĩnh vực chế tạo rô bốt mềm thông qua các công trình đã xuất bản. Dự án chiến thắng là Thiết bị truyền động mềm dựa trên bọt, của Phòng thí nghiệm Robot hữu cơ tại Đại học Cornell.
Các thiết bị truyền động mềm dựa trên bọt sử dụng bọt đàn hồi tế bào mở được bịt kín bằng chất đàn hồi không xốp, cho phép chúng có hình dạng và cấu hình mới. Quá trình chế tạo để tạo ra các bọt chất đàn hồi xốp liên quan đến quá trình đúc muối bị mất, tạo ra các kênh khí nén trong chất đàn hồi để chống lạm phát.
Các nhà nghiên cứu cho biết lợi thế chính là các bộ truyền động này có thể dễ dàng đúc, cắt, và thậm chí điêu khắc thành các hình dạng ba chiều, cho phép chế tạo đơn giản các máy mềm 3D. Các kênh mở và khoang lạm phát là một yêu cầu đối với thiết bị truyền động lưu động. Sử dụng các phương pháp chế tạo thiết bị truyền động chất lỏng khác thường yêu cầu phương pháp đúc khó (chẳng hạn như đúc mất sáp) hoặc các tổ hợp phức tạp của các thiết bị truyền động nhỏ để tạo thành các rãnh này. Với thiết bị truyền động bọt, các kênh chất lỏng đã có ở dạng lỗ thông liên kết với nhau
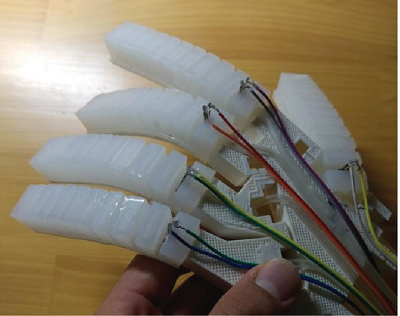
Mạch mềm nhúng in 3D, Phòng thí nghiệm MIT SAMs
Nhóm nghiên cứu đã sử dụng phương pháp in 3D để tạo ra một mạch mềm nhúng vào chất đàn hồi. Điều độc đáo là bàn tay này đồng khuôn tạo mạch cho một dãy đèn LED, cũng như các kênh khí nén để điều khiển chuyển động của bàn tay. Bàn tay là một bằng chứng về khái niệm cho các mạch mềm khác sẽ được nhúng vào các robot mềm khác trong tương lai
Theo nhóm, bất chấp những tiến bộ gần đây trong thiết bị truyền động mềm và rô bốt, việc tích hợp các chức năng điện tử vào các hệ thống rô bốt mềm vẫn là một thách thức. Đặc biệt, việc kết hợp các thành phần điện tử thông thường, cứng như dây đồng với các bộ phận robot mềm đặt ra nhiều vấn đề về tính toàn vẹn và ổn định của cấu trúc. Điều này là do sự không khớp đặc tính cơ học giữa các thành phần điện tử cứng và phần thân mềm tạo ra các điểm tập trung ứng suất tại các giao diện thường trở thành điểm khởi đầu cho sự cố trong quá trình vận hành.
Trong số các giải pháp khả thi, việc phát triển các dây dẫn mềm có các đặc tính cơ học tương đương với cơ thể robot mềm dường như là một triển vọng. Tuy nhiên, mặc dù một số loại dây dẫn vốn có thể co giãn đã được phát triển cho các cảm biến và ứng dụng điện tử khác nhau, việc kết hợp chức năng của các vật liệu đó vào các hệ thống robot mềm có xu hướng khó khăn.
Dự án này trình bày quy trình chế tạo gồm hai bước bao gồm in 3D mạch điện tử mềm trên đế mềm, sau đó là lắp ráp với thân rô bốt mềm đúc. Kết quả đã chứng minh rằng phương pháp được đề xuất có thể chế tạo thành công bàn tay robot mềm có nhúng các mạch điện tử mềm, cũng có thể phát sáng đèn LED.
Bộ truyền động ăn được
Người chiến thắng ở trường trung học là Trường Haveford của Pennsylvania và dự án của nó, Food for Thought — Edible Actuators. Nhóm nghiên cứu này đã tạo ra các robot có thể ăn được như một bằng chứng về khái niệm cho các robot mềm được sử dụng trong các ứng dụng bên trong cơ thể con người. Sử dụng kẹo dẻo truyền thống và khuôn in 3D của thiết bị truyền động như Pneunets và máy gắp mềm, nhóm này đã chế tạo thành công kẹo dẻo truyền động bằng khí nén.

Thiết bị truyền động mềm ăn được, Trường Haveford
Mục tiêu là chế tạo các thiết bị truyền động mềm từ kẹo cao su nóng chảy và cuối cùng, cải thiện lớp khoa học thường rất nhàm chán ở trường tiểu học bằng cách giới thiệu sớm về thế giới rô bốt mềm và điều khiển khí nén. Ngoài ra, những thiết bị gấu dẻo như vậy có thể hỗ trợ cung cấp vitamin, thuốc và vắc xin. Các sinh viên cho biết nhu cầu về các thiết bị truyền động kẹo dẻo ngon có thể được sử dụng trong phẫu thuật miệng như một cách tiếp cận dễ chịu trong miệng trẻ em. Trong khi dự án tập trung vào các khía cạnh giáo dục và giải trí của các thiết bị truyền động bằng keo và gelatin, có thể có nhu cầu rộng hơn về các thiết bị truyền động ăn được và ngon.
Cách lựa chọn mã sản phẩm , vật liệu , đặc tính và thông số kỹ thuật cũng như yêu cầu của quý khách hàng.Mọi thắc mắc cần được giải đáp cũng như tư vấn và nhận báo giá xin liên hệ với thông tin bên dưới :
CÔNG TY TNHH TÂN HẢI : 453B Đường Chiến Lược, Khu Phố 6, Phường Tân Tạo, Quận Bình Tân, Thành phố Hồ Chí Minh
Email : htrung@tanhaico.com Phone and zalo: Mr Trung : 0397536266