
Tin tức
QUY TRÌNH XỮ LÝ TỰ ĐỘNG HÓA BẰNG CHÂN KHÔNG GIÚP TĂNG NĂNG XUẤT

Th7
Không cần phải nói rằng các hệ thống được tối ưu hóa là hiệu quả nhất. Nhưng việc tối ưu hóa một hệ thống xử lý tự động dựa trên chân không phải xử lý nhiều loại sản phẩm và điều kiện hoạt động không phải là nhiệm vụ đơn giản. Điều đó đòi hỏi các công cụ điều tiết “thông minh”. Để đánh giá đầy đủ cách các công cụ như vậy có thể cải thiện hệ thống, chúng ta hãy lùi lại một chút thời gian.
Vào những năm 1830, máy móc trong các nhà máy dệt của Scotland, để hoạt động tối ưu, phải chạy ở nhiệt độ ổn định và ổn định. Nhu cầu tối ưu hóa đã dẫn đến sự phát triển của bộ điều nhiệt lưỡng kim. Bộ điều nhiệt cảm nhận nhiệt độ và sau đó tự động điều chỉnh hệ thống để nó duy trì các điều kiện mong muốn mà không cần can thiệp thủ công. Và các ghi chép cho thấy trên thực tế, các bộ điều nhiệt đơn giản đã được sử dụng vào đầu thế kỷ 17 để điều chỉnh nhiệt độ của lò ấp cho gà. Những ứng dụng công nghiệp đầu tiên của điều chỉnh nhiệt cũng là một số ví dụ đầu tiên của hệ thống điều khiển phản hồi

Người ta có thể hỏi, liệu các nhà máy dệt và máy ấp trứng gia cầm có liên quan gì đến hệ thống xử lý tự động dựa trên chân không? Chà, cái sau cũng được hưởng lợi từ quy định phản hồi, vì điều này giúp duy trì chính xác các hoạt động thích hợp mặc dù các điều kiện khác nhau. Một bộ điều chỉnh chân không được điều khiển “thông minh” sẽ cảm nhận áp suất chân không, sau đó tự động điều chỉnh áp suất cấp vào máy bơm chân không điều khiển bằng không khí để duy trì mức chân không đã đặt và không đổi. Giữ áp suất chân không không đổi trong các hệ thống xử lý tự động đảm bảo độ bám ổn định và giúp ngăn ngừa hư hỏng sản phẩm, tăng tốc độ sản xuất và giảm chi phí sản xuất tổng thể.
Điều chỉnh áp suất
Cốc hút chân không và máy bơm chân không điều khiển bằng không khí là sự kết hợp không thể đánh bại cho việc tự động kẹp và xử lý các vật dụng như hộp các tông. Máy lắp dựng thùng hoặc thùng carton và máy thùng quay được sử dụng rộng rãi trong toàn ngành công nghiệp và cùng với các ứng dụng do robot điều khiển như xếp và dỡ pallet, những ứng dụng này được hưởng lợi rất nhiều từ công thức công nghệ chiến thắng của cốc hút, máy bơm và vòi phun chân không điều khiển bằng không khí.
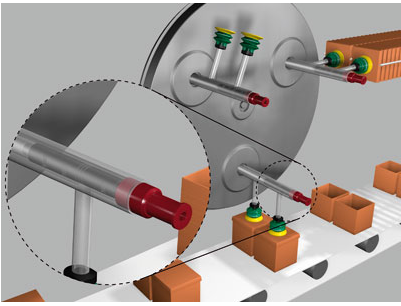
Tuy nhiên, để giữ an toàn cho các sản phẩm và không gây hư hỏng, điều cần thiết là phải duy trì chân không ở mức chính xác phù hợp cho từng hộp riêng biệt. Điều này nói thì dễ hơn làm, bởi vì các tông sóng là một vật liệu xốp; nó sẽ bị rò rỉ, nhưng không phải lúc nào cũng ở cùng một tỷ lệ. Tốc độ dòng khí qua vật liệu sẽ thay đổi ngay cả trong chất lượng thùng carton được xác định rõ.
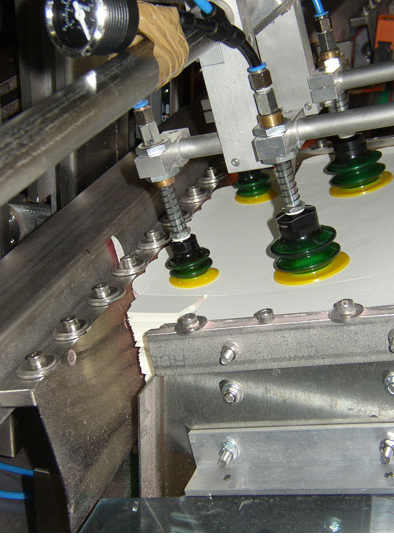
Khi sử dụng giác hút chân không khí nén, sự rò rỉ không khí cũng phụ thuộc vào độ kín của miệng cốc hút trên bề mặt tôn. Điều này có thể thay đổi từ hộp này sang hộp khác và từ chu kỳ sản xuất này sang chu kỳ sản xuất tiếp theo.
Theo truyền thống, các hệ thống xử lý chân không đối với vật liệu carton sóng đã được thiết kế cho “tình huống xấu nhất” về rò rỉ. Đó là, đảm bảo rằng có đủ lực nắm trong mỗi chu kỳ hoặc cho mỗi hộp các tông riêng lẻ. Kết quả là, nhiều hệ thống về cơ bản là quá khổ và do đó, lãng phí về tiêu thụ năng lượng cho hầu hết các chu kỳ hoạt động. Nhiều tiền hơn được chi cho năng lượng để tạo ra dòng chân không và các hệ thống lớn hơn cũng có xu hướng có chi phí trả trước cao hơn và có thể ảnh hưởng đến năng suất.
Giới hạn lực lượng
Một nhược điểm nghiêm trọng khác là lực quá mạnh có thể làm hỏng hộp hoặc sản phẩm. Cốc hút tạo cảm giác cầm nắm nhẹ nhàng so với nhiều giải pháp thay thế khác và sẽ không làm hỏng bề mặt bìa cứng nếu được sử dụng đúng cách. Lực nâng có thể được điều khiển bởi kích thước của cốc và áp suất chân không.
Hư hỏng bề mặt của hộp các tông có liên quan đến áp suất chân không cao. Do đó, có sự cân bằng giữa lực nâng / xử lý cần thiết và khả năng gây hại cho bề mặt, và rất khó để tinh chỉnh sự cân bằng này cho mỗi chu kỳ hoặc hộp.
Bề mặt của hộp có thể bị hỏng hoặc bị đánh dấu nếu áp suất chân không tăng trong cốc hút vì lưu lượng rò rỉ qua hộp các tông thấp hơn dự kiến và thấp hơn lưu lượng rò rỉ trung bình của các hộp trong một chu kỳ cụ thể. Thông thường, áp suất chân không cao không cần thiết được sử dụng để đạt đủ lực hút, thay vì thiết kế một hệ thống với các cốc đủ lớn.
Giải pháp là duy trì chân không liên tục mặc dù có sự thay đổi trong cấu tạo vật liệu bìa cứng. Nếu mức độ chân không cố định hoặc không đổi có thể được đảm bảo bất kể chất lượng các tông trong mỗi hộp, thì có thể tránh được hư hỏng hoặc dấu vết, đồng thời vẫn có đủ áp suất chân không để giữ và nâng hộp và duy trì tốc độ sản xuất tối đa.
Hút chân không ổn định khi xử lý các tông sóng giúp giảm thiểu các vết lõm hoặc vết và giảm tiêu thụ năng lượng.
Thật không may, áp suất cấp cho máy bơm chân không dẫn động bằng không khí thường được điều chỉnh bằng bộ điều chỉnh áp suất không khí được điều khiển bằng tay. Thiết bị điều chỉnh đường cung cấp áp suất cao và cung cấp áp suất không khí không đổi được đặt / điều chỉnh cho thiết bị — ví dụ, một máy bơm điều khiển bằng không khí — độc lập với lưu lượng áp suất không khí, nhưng không phải là mức chân không không đổi.
Thảo luận ở trên cho thấy rằng đối với các ứng dụng xử lý các tông sóng bằng cốc hút cao sau chân không, sẽ nhẹ nhàng nhất (không có vết hoặc hư hỏng), tiết kiệm và hiệu quả năng lượng nếu áp suất cấp cho máy bơm điều khiển bằng không khí có thể thay đổi theo từng chu kỳ để giữ chân không mức không đổi. Với một bộ điều chỉnh được điều khiển bằng tay sẽ yêu cầu một người toàn thời gian điều chỉnh áp suất cấp liệu bằng tay cho mỗi chu kỳ – ít nhất là không thực tế.
Piab đã giải quyết nhu cầu này với sự phát triển của bộ điều chỉnh áp suất không khí có điều khiển phản hồi chân không, trong đó người vận hành chỉ đặt mức chân không không đổi một lần. Được thiết kế riêng cho máy bơm và vòi phun chân không điều khiển bằng không khí, bộ điều chỉnh thông minh này, được gọi là tối ưu hóa piSAVE, cảm nhận độ chân không của hệ thống trên một cổng cảm biến, sau đó điều chỉnh để duy trì mức chân không không đổi bằng cách tăng hoặc giảm áp suất không khí trong thời gian cho chân không máy bơm.
Do đó, nó tự động điều chỉnh áp suất được cung cấp của bơm chân không dựa trên ứng dụng. Chỉ lượng khí nén cần thiết sẽ được sử dụng mà không làm giảm tốc độ hoặc hiệu suất. Ban đầu, thiết bị bắt đầu với áp suất đầy đủ cho đến khi nó đạt đến mức chân không đã đặt và đảm bảo toàn bộ lực và tốc độ hút khi các cốc hút được áp lên bề mặt.
Đối với hệ thống chân không xử lý các tông sóng, bộ tối ưu hóa piSAVE duy trì áp suất chân không không đổi bằng cách điều chỉnh áp suất cấp vào bơm chân không dẫn động bằng khí, tự động, tuần hoàn theo chu kỳ. Áp suất chân không không đổi và thấp nhất có thể (được tối ưu hóa) trong hệ thống xử lý các tông sóng sẻ :
- Loại bỏ rủi ro hư hỏng / dấu vết trên bề mặt.
- Giảm mức tiêu thụ năng lượng trong khoảng 30 đến 50%, tương đương với khoản tiết kiệm hàng năm khoảng 125 đô la cho mỗi lần cài đặt cho một ứng dụng xử lý thông thường.

Một hệ thống chân không quá khổ để xử lý các tông sóng là một hiệu ứng của sự rò rỉ khác nhau từ thùng carton này sang thùng carton khác nhau để xử lý các tình huống xấu nhất. Nó tạo ra áp suất chân không sâu không cần thiết (tiêu tốn thêm năng lượng) cho hầu hết các chu kỳ / mẫu, cũng như làm tăng nguy cơ hư hỏng bề mặt.
Mức độ chân không không đổi đối với các vật liệu như bìa cứng, mặc dù có sự thay đổi rò rỉ lớn (cả qua và trên bề mặt) theo chu kỳ, giờ đây có thể dễ dàng đạt được với thế hệ bộ điều chỉnh áp suất không khí được kiểm soát chân không mới, như tối ưu hóa piSAVE.
piSAVE tối ưu hóa có phạm vi hoạt động cho các mức chân không đặt từ 25 đến 70 kPa (7,4 đến 20,7 in.-Hg). Nó hoạt động với bất kỳ máy bơm / đầu phun điều khiển bằng không khí nào có mức tiêu thụ không khí từ khoảng 100 đến 900 Nl / phút (3,5 đến 31,8 scfm) ở áp suất nạp khuyến nghị. Điều đó bao gồm máy bơm / đầu phun chân không một tầng, điều khiển bằng không khí cũng như máy bơm / vòi phun chân không nhiều tầng. Đối với các mạch có bộ đẩy nhỏ hơn, một bộ tối ưu hóa piSAVE có thể được sử dụng cho hai hoặc nhiều bộ đẩy nhỏ.
Bên cạnh việc tiết kiệm năng lượng tích cực từ khía cạnh môi trường, sự khác biệt thấp về giá so với bộ điều hòa không khí truyền thống sẽ được đền đáp sau vài tháng nếu lắp đặt mới.
Cập nhật một hệ thống hiện có đã có bộ điều chỉnh thường sẽ có hiệu quả trong vòng chưa đầy một năm trong một ứng dụng xử lý cốc hút cho các tông sóng.
Các kỹ sư xử lý vật liệu hiện có thể sử dụng quy định kiểm soát phản hồi chân không để tối ưu hóa các hệ thống tự động dựa trên máy phun chân không và để tăng năng suất của họ trong quá trình này mà không ảnh hưởng đến sức nâng.
núm hút chân không lớn hơn so với cốc lớn hơn
Lực kẹp và nâng trong ứng dụng xử lý cốc chân không có thể được điều khiển bởi kích thước của cốc và áp suất chân không. Đối với các kỹ sư, nguyên tắc chung là tốt nhất là giữ áp suất chân không càng thấp và cốc càng lớn càng tốt.
Coi rằng lực nâng từ cốc hút được xác định bởi hai yếu tố: diện tích cốc hút và áp suất chân không, hoặc F = A x P. Vì diện tích là một đơn vị “hình vuông”, rõ ràng lực sẽ tăng hoặc giảm nhiều hơn. bằng cách thay đổi diện tích cốc hút so với thay đổi áp suất chân không. Vì vậy áp suất chân không giảm nhỏ sẽ không ảnh hưởng nhiều đến lực. Kết luận đơn giản cho các nhà thiết kế hệ thống là sử dụng áp suất chân không càng thấp càng tốt và cốc hút càng lớn càng tốt.
Tiết kiệm chi phí máy tính năng lượng
Hạn chế áp suất chân không lên các vật liệu bị rò rỉ như hộp các tông sóng có thể làm giảm đáng kể mức tiêu thụ năng lượng trong máy bơm chân không. Nhưng kết quả tiết kiệm có đáng giá không? Công cụ tính toán năng lượng tối ưu hóa piSAVE của Piab giúp chi tiết hóa các khoản tiết kiệm cụ thể.
Công cụ trực tuyến trước tiên cho phép người dùng chọn đơn vị hệ mét hoặc hệ Anh. Sau đó, một người chọn loại vòi phun đã được lắp đặt. Điều này bao gồm một loạt các đầu phun Mini và Midi Coax, các hàng đầu phun Cổ điển và nhiều đầu phun có kích thước đường kính từ 0,8 đến 2,5 mm.
Tiếp theo, công cụ truy vấn số đầu phun / hàng đầu phun, thời gian “bật chân không” và “tắt hút chân không” cho ứng dụng và giờ hoạt động mỗi năm. Cuối cùng, người dùng nhập áp suất nguồn cấp vào đầu phun trước và sau khi lắp đặt bộ điều chỉnh tối ưu hóa piSAVE.