
Tin tức
Bộ hiệu ứng khí nén phi truyền thống mang lại sự linh hoạt và khéo léo.

Th8
Các thiết bị như vậy hoạt động tốt trong các hoạt động sản xuất và công nghiệp có tính lặp lại cao, thường có độ chính xác cao. Nhưng họ không thành thạo các công việc ít cấu trúc hơn, chẳng hạn như cầm nắm các sản phẩm mỏng manh hoặc có kích thước và hình dạng khác nhau. Do đó, nhiều hoạt động vẫn dựa vào việc lắp ráp và xử lý thủ công.
Thế giới đó đang thay đổi. Công nghệ rô bốt đang tiến bộ nhanh chóng với những phát triển như rô bốt mềm và rô bốt – những cỗ máy đa năng có thể sát cánh cùng con người trong việc thu hoạch thực phẩm, hỗ trợ y tế, kho bãi và các thiết lập phi truyền thống khác. Tương tự như vậy, nhu cầu ngày càng tăng đối với các loại hiệu ứng cuối robot mới, chẳng hạn như bộ kẹp mềm, để hỗ trợ thúc đẩy tự động hóa.
Kẹp gắp mềm, không giống như các thiết bị cơ khí thông thường, được làm bằng vật liệu phù hợp và thường xuyên chạy bằng khí nén. Sự quan tâm đang gia tăng với nhu cầu ngày càng tăng về các thiết bị linh hoạt hơn có thể tương tác trong các môi trường ít cấu trúc hơn. Ví dụ, việc thu hoạch và đóng gói trái cây và rau quả tự động đòi hỏi máy xay có thể xử lý các sản phẩm mỏng manh dễ bị hư hỏng bởi máy nghiền cứng thông thường. Tương tự như vậy, các kho thương mại điện tử cần các bộ kẹp có thể thao tác với các gói hàng có kích thước, hình dạng và trọng lượng khác nhau.

Festo’s OctopusGripper được mô phỏng theo xúc tu của con bạch tuộc và có cấu trúc silicone mềm được điều khiển bằng khí nén.
Máy gắp mềm cung cấp nhiều lợi ích hơn so với các loại máy cứng hơn của chúng. Nhờ lớp đệm vốn có của khí nén, chúng có thể phù hợp với các bề mặt hoặc vật thể, hấp thụ năng lượng để duy trì sự ổn định, thể hiện sự mạnh mẽ về thể chất và vận hành an toàn cho con người với chi phí thấp tiềm năng. Áp suất bên trong chống lại sự xô lệch và phân bổ ứng suất trong toàn bộ kết cấu. Đưa khí nén vào và ra khỏi hệ thống điều khiển chuyển động.
Với ít bộ phận, chúng loại bỏ vòng bi, trục và các cơ cấu khác. Các thiết bị này thường có trọng lượng nhẹ hơn và có thể an toàn hơn các thiết bị hiệu ứng cuối truyền thống vì chúng giảm thiểu lực tác động trong trường hợp va chạm. Nhược điểm, quan trọng trong một số ứng dụng, là chúng hy sinh độ chính xác để tuân thủ.
Máy kẹp mềm mở ra cánh cửa cho việc xử lý các sản phẩm mà trước đây rất khó hoặc không thể tự động hóa. Do đó, họ có thể giải phóng công nhân khỏi nhiều công việc đơn điệu hoặc nguy hiểm. Các nhà nghiên cứu tại các trường đại học và phòng thí nghiệm R&D trên toàn cầu đang thúc đẩy công nghệ kẹp mềm. Dưới đây là cái nhìn sâu hơn về một số cải tiến mới cũng như một vài thiết kế đã được thử nghiệm.
Soft Robotics Inc., một công ty con của Đại học Harvard được thành lập cách đây sáu năm, đã phát triển một số máy gắp khí nén tập trung chủ yếu vào xử lý thực phẩm, đóng gói và các ứng dụng công nghiệp. Theo các quan chức của công ty, một hạn chế lớn trong việc áp dụng các hệ thống thao tác bằng robot là thiếu khả năng tiếp cận với các cơ chế cầm nắm linh hoạt cho phép không chỉ nhặt mà còn thao tác khéo léo các vật thể hàng ngày.
Họ đang tấn công vấn đề đó bằng cách thiết kế và xây dựng một hệ thống bao gồm các bộ gắp robot mềm, cũng như hệ thống điều khiển và phần mềm cho phép một thiết bị được chế tạo duy nhất thao tác các mặt hàng có kích thước, hình dạng và trọng lượng khác nhau.
Theo họ, kết quả là một loại máy gắp rô bốt mới về cơ bản có khả năng thíc ứng, cắm và chạy,h có thể lặp lại và đáng tin cậy. Điều đáng chú ý nữa là bộ gắp được thiết kế để gắn trực tiếp trên nhiều robot thương mại hiện có.
Chúng phù hợp cho dịch vụ hậu cần kho liên quan đến các vật thể có kích thước không thể đoán trước; các nhiệm vụ lắp ráp tiên tiến hiện đang đòi hỏi lao động đáng kể; và xử lý thực phẩm, nơi vệ sinh và thao tác tinh vi là quan trọng. Về bản chất, bộ gắp mềm Soft Robotics được thiết kế để vượt trội khi công nghệ rô bốt thông thường còn thiếu sót.
Các hiệu ứng cuối được báo cáo cho phép các robot đóng gói, thực phẩm và đồ uống và công nghiệp xử lý các vật thể khác nhau một cách thích ứng với một thiết bị dễ sử dụng duy nhất, loại bỏ nhu cầu thay đổi công cụ và các yêu cầu phức tạp về thị lực. Bộ điều khiển tốc độ cao (> 3 Hz) với phản hồi mili giây đảm bảo các hành động có thể lặp lại và đáng tin cậy. Tương thích với mọi bộ điều khiển robot thương mại trên thị trường, bộ điều khiển Soft Robotics cung cấp tích hợp chìa khóa trao tay, cho phép người dùng nhanh chóng cài đặt và vận hành hệ thống cho các ứng dụng mới hoặc trang bị thêm mà không cần thêm thành phần hoặc phần cứng điều khiển.
Bộ điều khiển chạy trên nguồn 24 Vdc và 0,5 A. I / O kỹ thuật số bao gồm bốn đầu vào 24-Vdc và hai đầu ra 10 mA. Phần mềm này cho phép người dùng kiểm soát tất cả các thông số tay nắm bao gồm lực, khoảng cách cơ cấu truyền động và chiều rộng mở. Và bộ điều khiển có thể lưu trữ tối đa tám cấu hình cài đặt (kẹp và nhả). Thiết bị được xếp hạng IP65, và nó yêu cầu 85 đến 100 psi nén và 2 đến 8 scfm được lọc và xử lý không khí.
Bản thân bộ kẹp được làm bằng vật liệu polyme đàn hồi mềm và có nhiều kiểu dáng. Ví dụ, máy gắp thực phẩm an toàn hình tròn bốn bộ truyền động (bốn ngón tay) được thiết kế cho các ứng dụng phân loại và đóng gói liên quan đến các sản phẩm tinh tế và các mặt hàng bánh, như táo hoặc sôcôla nhỏ.
Máy có khối lượng 964 gm và cao 160 mm. Nó thường có thể nắm các vật có OD từ 40 đến 95 mm, với khoảng cách ngón tay đối diện là 63,5 mm. Thời gian chu kỳ là 88 mili giây để đóng và 166 mili giây để mở, và lực cầm là 2,5 lb cho mỗi ngón tay. Áp suất hoạt động là 0 đến 12 psi và phạm vi nhiệt độ là -10 ° đến 65 ° C. Không khí được cung cấp qua đường kính 10 mm, ống đẩy để kết nối, polyurethane hoặc nylon. Thiết bị đáp ứng các yêu cầu của FDA-CFR Tiêu đề 21 đối với vật liệu tiếp xúc với thực phẩm và được xếp hạng cấp bảo vệ IP67.
Một phiên bản hình chữ nhật tương tự xử lý các sản phẩm như tai ngô, bánh mì, bánh ngọt và túi đứng. Cấu hình an toàn thực phẩm hình tròn năm bộ truyền động phù hợp với các đối tượng có trọng lượng, hình dạng và kích thước khác nhau như quả bóng bột và miếng bánh hamburger.
Về mặt công nghiệp, bộ kẹp tự động hóa hai cơ cấu truyền động của công ty là một cấu hình nhỏ gọn và nhẹ để chọn thùng rác và các ứng dụng khác liên quan đến các đồ vật được nhóm chặt chẽ như bút, mỹ phẩm nhỏ và nhựa nhỏ. Dụng cụ hình chữ nhật có khoảng cách ngón tay đối diện là 15 mm với phạm vi nắm điển hình từ 1 đến 40 mm. Thời gian chu kỳ cầm là 124 mili giây để đóng và 234 mili giây để mở, một lần nữa với lực nắm ngón tay là 2,5 lb. Nó được xếp hạng cấp bảo vệ IP52 và có khối lượng 337 gm.
Các đơn vị hình chữ nhật sáu bộ truyền động lớn hơn được chế tạo để xử lý nhiều đồ vật lớn hơn như túi lớn, ổ bánh mì, đồ chơi và thú nhồi bông, túi lớn và túi IV. Các độ dài khác nhau của bộ truyền động có sẵn trên các công cụ khác nhau, tùy thuộc vào ứng dụng.
Festo là công ty tiên phong sử dụng bộ gắp mềm để sử dụng trên các rô bốt nhẹ, phù hợp để làm việc cùng với con người. Công việc này bắt nguồn từ Mạng học tập Bionic của công ty, nơi các kỹ sư phát triển các công nghệ lấy cảm hứng từ thiên nhiên để tự động hóa công nghiệp với sự cộng tác của các trường đại học và viện nghiên cứu hàng đầu. Theo công ty, robot lấy cảm hứng từ sinh học với bộ truyền động khí nén rất phù hợp cho không gian làm việc hợp tác và có thể đại diện cho một giải pháp thay thế hiệu quả về chi phí cho các khái niệm robot cổ điển.
Một chiếc kẹp bionic mềm như vậy, được gọi là OctopusGripper, đã được giới thiệu tại Hội chợ Hannover năm ngoái ở Đức. Thiết bị được mô phỏng theo xúc tu của con bạch tuộc và bao gồm một cấu trúc silicone mềm có tính năng chuyển động học được điều khiển bằng khí nén với lực giữ chân không. Việc áp dụng khí nén sẽ uốn cong xúc tu vào trong, để nó quấn quanh và kẹp chặt một vật thể theo cách vừa vặn và nhẹ nhàng. Hai hàng cốc hút được điều khiển chủ động và thụ động ở bề mặt bên trong giúp gắn và giữ nhiều đồ vật có hình dạng khác nhau một cách an toàn.
Cấu trúc mềm, vốn có tính linh hoạt của nó có tiềm năng lớn để sử dụng trong các không gian làm việc hợp tác, an toàn cho con người trong tương lai, theo Festo. Bộ kẹp linh hoạt được sử dụng kết hợp với BionicMotionRobot và BionicCobot của công ty. Những robot nhẹ bằng khí nén này có tính năng động lực học chuyển động tự nhiên được mô phỏng trên cánh tay người và vòi voi.
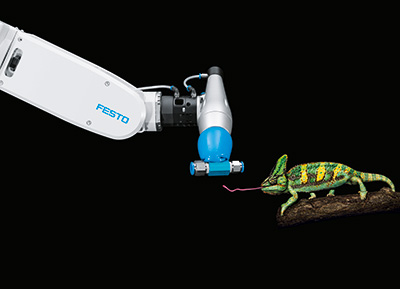
Một sự phát triển thú vị khác là Festo’s FlexShapeGripper, một thiết bị được cho là được mô phỏng theo lưỡi của tắc kè hoa. Bộ kẹp bao gồm một xi lanh tác động kép phi truyền thống với một buồng chứa đầy khí nén; và một cái thứ hai chứa đầy nước vĩnh viễn và bao gồm một khuôn silicon đàn hồi. Thể tích của hai khoang được thiết kế để bù cho sự biến dạng của phần silicone.
Pít-tông, ngăn cách hai khoang, được gắn chặt bằng một thanh mỏng ở bên trong nắp silicone.
Không phải tất cả các gắp mềm đều đại diện cho những đổi mới tiên tiến và mang tính tương lai. Firestone Industrial Products, một đơn vị của Bridgestone, đã cung cấp các thiết bị AirPicker và AirGripper của mình trong một số năm. Những thiết kế đã được kiểm chứng rõ ràng này dựa trên kết cấu cao su được gia cố bằng vải, chắc chắn được sử dụng trên lò xo không khí công nghiệp kiểu ống thổi và thiết bị truyền động linh hoạt.
Các bộ phận xử lý, do hình dạng cao su bơm hơi linh hoạt của chúng, có thể tự gắn vào các vật dụng dễ vỡ hoặc nhạy cảm có kích thước khác nhau và giữ chúng nhẹ nhàng và an toàn tại chỗ. Các ứng dụng điển hình bao gồm xử lý ống nghiệm, chai và xi lanh, và được sử dụng trong lắp ráp, tải, vận chuyển và các hoạt động sản xuất khác.
Bộ phận tạo hiệu ứng cuối AirPicker chèn vào sản phẩm trong khi xì hơi, sau đó bơm hơi bằng khí nén ra bên ngoài để thiết lập vòng đệm bên trong và giữ các thành bên trong của sản phẩm — để sản phẩm được nhấc lên và di chuyển một cách cơ học. AirGripper bao quanh một sản phẩm, sau đó ống tay áo phồng vào trong để tạo thành một chỗ bám xung quanh bên ngoài của sản phẩm.

Các thiết bị Firestone AirPicker và AirGripper có cấu trúc cao su được gia cố bằng vải, chắc chắn. Hình dạng có thể bơm hơi linh hoạt của chúng cho phép chúng gắn vào các vật dụng dễ vỡ hoặc nhạy cảm có kích thước khác nhau và giữ chúng nhẹ nhàng và an toàn ở vị trí.
Bộ phận tạo hiệu ứng cuối AirPicker chèn vào sản phẩm trong khi xì hơi, sau đó bơm hơi bằng khí nén ra bên ngoài để thiết lập vòng đệm bên trong và giữ các thành bên trong của sản phẩm — để sản phẩm được nhấc lên và di chuyển một cách cơ học. AirGripper bao quanh một sản phẩm, sau đó ống tay áo phồng vào trong để tạo thành một chỗ bám xung quanh bên ngoài của sản phẩm.
Theo công ty, các thiết bị này phù hợp với các đối tượng khác nhau về hình dạng hoặc kích thước và mang lại nhiều lợi thế hơn so với các thiết bị chọn và đặt truyền thống. Chỉ cần kiểm soát áp suất trong bàng quang, họ có thể cầm nắm các vật mỏng manh một cách an toàn nhưng bằng một cái chạm nhẹ nhàng. Các sản phẩm phù hợp với nhiều loại đường kính và trọng lượng phôi — mang đến giải pháp bền bỉ, chi phí thấp cho các hệ thống xử lý cơ khí hoặc rô bốt.
Trong số các ưu điểm được báo cáo, cấu trúc cao su bơm hơi cho phép xử lý nhiều hình dạng và kích thước với một mô hình. Đường kính của AirPicker có thể tăng gần gấp đôi so với đường kính bị xì hơi của nó, trong khi AirGripper có thể bám quanh một vật thể chỉ bằng 40% đường kính bị xì hơi. Kiểm soát áp suất trong bàng quang kiểm soát lực lên vật thể và lực giữ được phân bổ trên một diện tích bề mặt lớn hơn trong một bộ kẹp cơ học, dẫn đến một kẹp mềm và an toàn và khả năng chịu tải cao hơn. Ngược lại, bộ kẹp cơ cứng nhắc chỉ tiếp xúc với một vùng nhỏ bằng ngón tay. Các sản phẩm của Firestone cũng cung cấp khả năng tiếp xúc không mài mòn, quan trọng với các đồ vật bằng thủy tinh và nhựa. Và bởi vì các thiết bị không cần con dấu hoặc vòng bi, chúng bền hơn so với bộ kẹp cơ khí trong môi trường bụi bẩn.
AirPickers tiêu chuẩn có thể xử lý các đối tượng có ID từ khoảng 0,3 đến hơn 4,0 inch. AirGrippers tiêu chuẩn dành cho các đối tượng có giá trị từ 0,2 đến 1,8 inch. OD. Chúng có cấu tạo từ nhựa Neoprene và silicone nhiệt độ cao, với nhiệt độ làm việc tương ứng từ 0 ° đến 165 ° F (-18 ° đến 74 ° C) và -22 ° đến 320 ° F (-30 ° đến 160 ° C). Chúng thường chạy bằng khí nén ở áp suất khoảng 70 psi, mặc dù các mẫu có sẵn với các áp suất lạm phát khác nhau để xử lý tải từ nhẹ đến nặng. Tùy thuộc vào kích thước và ứng dụng, các thiết bị có thể chịu tải tốt hơn 50 lb.
Kẹp giãn nở hoạt động bằng khí nén, tác động một lần của FIPA nhẹ nhàng kẹp chặt các đường viền bên trong của phôi mà không để lại bất kỳ dấu vết nào, cung cấp một giải pháp thay thế hiệu quả cho cốc hút và dụng cụ gắp sprue cho các sản phẩm có lỗ hoặc hốc và cho các bộ phận đùn và kéo rỗng.
Chúng được thiết kế để xử lý các bộ phận nhẹ và thích hợp để tích hợp vào các hệ thống gắp khác. Các phiên bản nhỏ hơn dành cho đường kính từ 3 đến 10 mm và có đầu gắp bằng polyamide thích hợp để kẹp trong các hốc nhỏ và được FDA chấp thuận để tiếp xúc trực tiếp với thực phẩm.
Các phiên bản lớn hơn có đường kính từ 8 đến 85 mm. Chúng có ống thổi đàn hồi độ bền cao được làm bằng EPDM hoặc silicone, loại sau được FDA chấp thuận để tiếp xúc trực tiếp với thực phẩm. Phạm vi nhiệt độ làm việc cho EPDM và ống thổi silicone tương ứng lên đến 130 ° C (266 ° F) và 200 ° C (392 ° F).

Bộ gắp giãn nở hoạt động bằng khí nén của FIPA nhẹ nhàng kẹp chặt các đường viền bên trong của phôi, cung cấp một giải pháp thay thế hiệu quả cho các cốc hút và bộ gắp cơ học.
Chúng mở rộng thông qua các piston dẫn động bằng khí nén, thay vì lạm phát, để tránh mọi nguy cơ nổ. Cảm biến tùy chọn có thể giám sát vị trí piston.
Bộ kẹp chứa các phôi gia công có kích thước và trọng lượng khác nhau vượt quá 1 kg. Và kết hợp với một loạt các yếu tố lắp đặt, chúng có thể xử lý sản phẩm theo hầu hết mọi hướng. Áp suất nạp liệu tối ưu nằm trong khoảng từ 6 đến 8 bar, mặc dù áp suất nạp và lực giữ có thể được điều chỉnh để phù hợp với từng phôi riêng biệt.
Các hiệu ứng cuối Versaball linh hoạt hoạt động dựa trên hành động gây nhiễu
Bất chấp những nỗ lực hết mình và những thiết kế mới lạ, không phải tất cả các bước đột phá vào bộ gắp mềm đều thành công về mặt thương mại — như trường hợp của Empire Robotics. Hầu hết các dụng cụ kẹp mềm đều dựa vào một số loại kẹp để cố định một vật thể. Ngược lại, Empire đã sử dụng hành động “gây nhiễu” với bộ kẹp Versaball, được thiết kế để phù hợp với các nền tảng robot hiện có.
Công nghệ cơ bản rất hấp dẫn. Công ty đã phát triển các thiết bị hiệu ứng cuối linh hoạt dựa trên sự chuyển đổi giai đoạn gây nhiễu của các vật liệu dạng hạt. Thiết bị này bao gồm một quả bóng đàn hồi chứa đầy vật liệu giống như cát. Cung cấp không khí có áp suất vào quả bóng làm cho nó mềm ra. Sau đó, một cánh tay robot ép nó vào một vật thể và thoát khí ra khiến vật liệu dạng hạt cứng lại và bám chặt vào vật thể đó. Ưu điểm được cho là tính linh hoạt vốn có, tiếp xúc mềm mại và khả năng cầm nắm an toàn trên các bộ phận phức tạp.
Công ty đã tìm kiếm nguồn vốn hạt giống từ các quỹ đầu tư, giành chiến thắng trong nhiều cuộc thi lập kế hoạch kinh doanh, trưng bày tại các triển lãm thương mại lớn và được báo cáo đã tạo ra hơn nửa triệu đô la doanh số bán sản phẩm. Nó thậm chí còn xuất hiện trên The Tonight Show. Thật không may, quá trình thương mại hóa đã không thành công và Empire Robotics đã phải đóng cửa cửa hàng vào năm ngoái.
Cách lựa chọn mã sản phẩm , vật liệu , đặc tính và thông số kỹ thuật cũng như yêu cầu của quý khách hàng.Mọi thắc mắc cần được giải đáp cũng như tư vấn và nhận báo giá xin liên hệ với thông tin bên dưới :
CÔNG TY TNHH TÂN HẢI : 453B Đường Chiến Lược, Khu Phố 6, Phường Tân Tạo, Quận Bình Tân, Thành phố Hồ Chí Minh
Email : htrung@tanhaico.com Phone and zalo: Mr Trung : 0397536266